新着ニュース
赤外線誘導式人工膝関節手術支援ロボット NAVIO™ 導入
当院人工関節センターでは地域の先生方からのご紹介を受け年間200件以上の手術を継続的に行なっております。この度、当センターでは人工膝関節置換術を支援する最新型手術ロボットNAVIO™(Smith & Nephew社製、図1)を導入しましたのでご紹介させて頂きます。
手術支援ロボット導入の背景:
従来、人工膝関節の設置精度と術後の耐用年数や患者様の術後満足度には相関があることが知られておりました。さらに、前後十字靭帯を温存人工膝においてはより高い設置精度が求められています。しかし、人間の手作業には精度に限界があり、熟練術者でも角度にして4°程度のエラーが生じる場合があります(表1)。安全性・低侵襲性と高い設置精度を全て満足するためには、最新のナビゲーション手術ロボットによる支援が不可欠と考えられます。
手術支援ロボットNAVIO™の特徴:
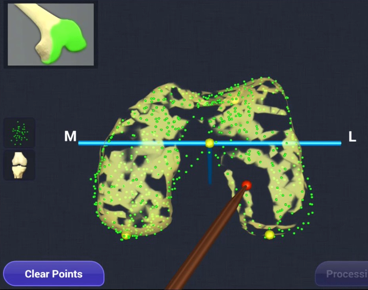
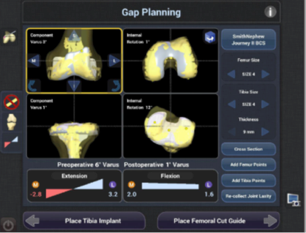
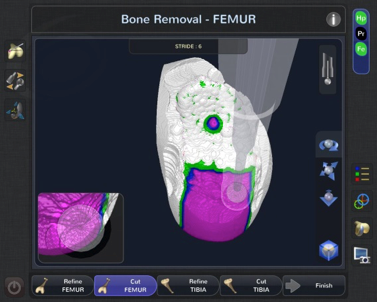
我が国では、術前のCT画像をベースに制御を行う人工股関節手術ロボットが数台導入されていますが、このロボットを膝の手術に用いると、CTでは軟骨部分を認識できないこと、靭帯バランスを考慮した設計ができないことなどの問題が生じます。今回、当センターで導入したNAVIO™ では、反射板アレーを装着したドリルバー付きハンドピースを最新の赤外線誘導技術により空間制御します(図1)。手術中に、軟骨を含む関節面をハンドピースのプローブで“なぞる”こと(mapping)により軟骨を含めた関節面形状を精密に登録し(図2)、次に、関節の他動運動により靭帯緊張度を登録します。これにより靭帯バランスを考慮した設置計画を行います(図3)。計画が終了すれば、コンソール画面を見ながらドリルバーを用いて関節面を掘削します。掘削すべき部位にサージエアトームを位置させると、ドリルバーは自動的に回転を始めます。ドリルバーの回転と停止、回転速度はロボットにより制御されます(図4)。画面上には掘削すべき箇所が紫色で3D表示され、掘削が終了すると白色に変化します(図5)。すなわち、計画された部位以外の骨軟骨が削除されることはありません。
NAVIO™ を使用した人工膝関節手術の成績:
手術支援ロボットを使用しない従来方法による手術では、目標とした設置位置に対して、角度では矢状面6.0°、冠状面4.1°、軸位6.3°の誤差、距離にすると冠状面2.6mm、矢状面2.4mm、遠位近位方向1.6mmの誤差の可能性があります。NAVIO™ を使用した場合は、角度では矢状面1.7°、冠状面2.4°、軸位1.7°に減少し、距離にすると冠状面1.3mm、矢状面1.3mm、遠位近位方向では1.0mmに誤差が減少します(表1)。
NAVIO™ の導入より、当人工関節センターでは、より高い精度のインプラント設置とより安全な手術実施により患者様の高い満足度が得られると考えております。また、近い将来、この支援ロボットは人工股関節手術にも適応されます。人工関節手術をご検討の患者様がおられましたら、是非当人工関節センターへご紹介頂けます様お願い申し上げます。
(表)| Direction | NAVIO | Manual Technique |
|---|---|---|
| Flexion/Extension (°) | 1.7 | 6.0 |
| Varus/valgus (°) | 2.4 | 4.1 |
| Internal/external rotation (°) | 1.7 | 6.3 |
| Medial/lateral (mm) | 1.3 | 2.6 |
| Anterior/posterior (mm) | 1.3 | 2.4 |
| Proximal/distal (mm) | 1.0 | 1.6 |